Planning under Uncertainty to Goal Distributions
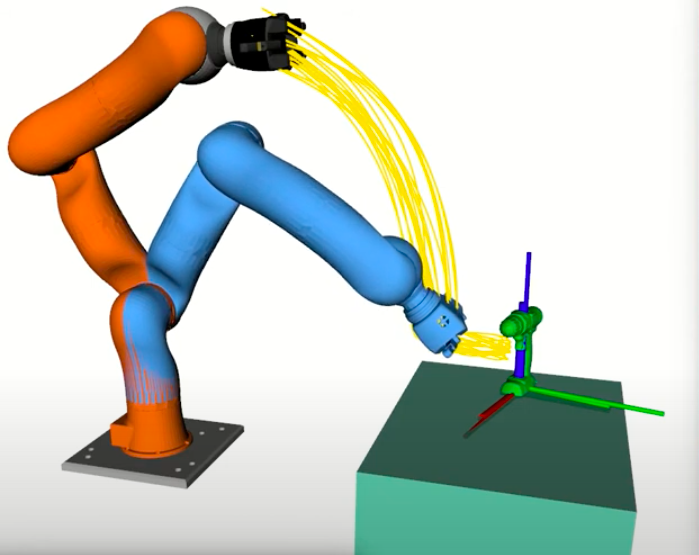
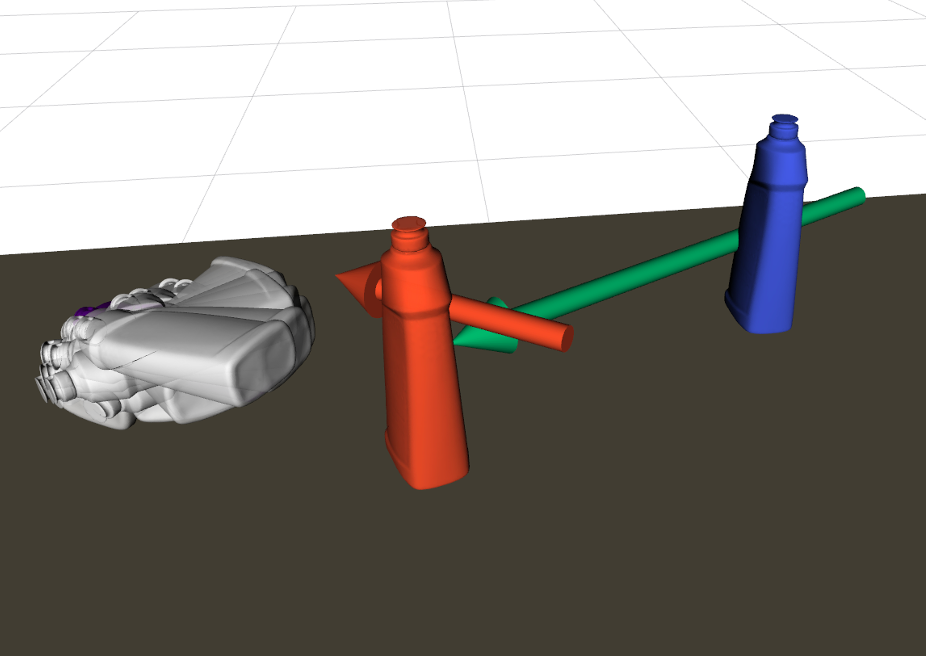
New formalization of goals as distributions for robot planning under uncertainty.
Commercials, Music Videos, Television, TV News, Corporate video, and everything in between.
New formalization of goals as distributions for robot planning under uncertainty.
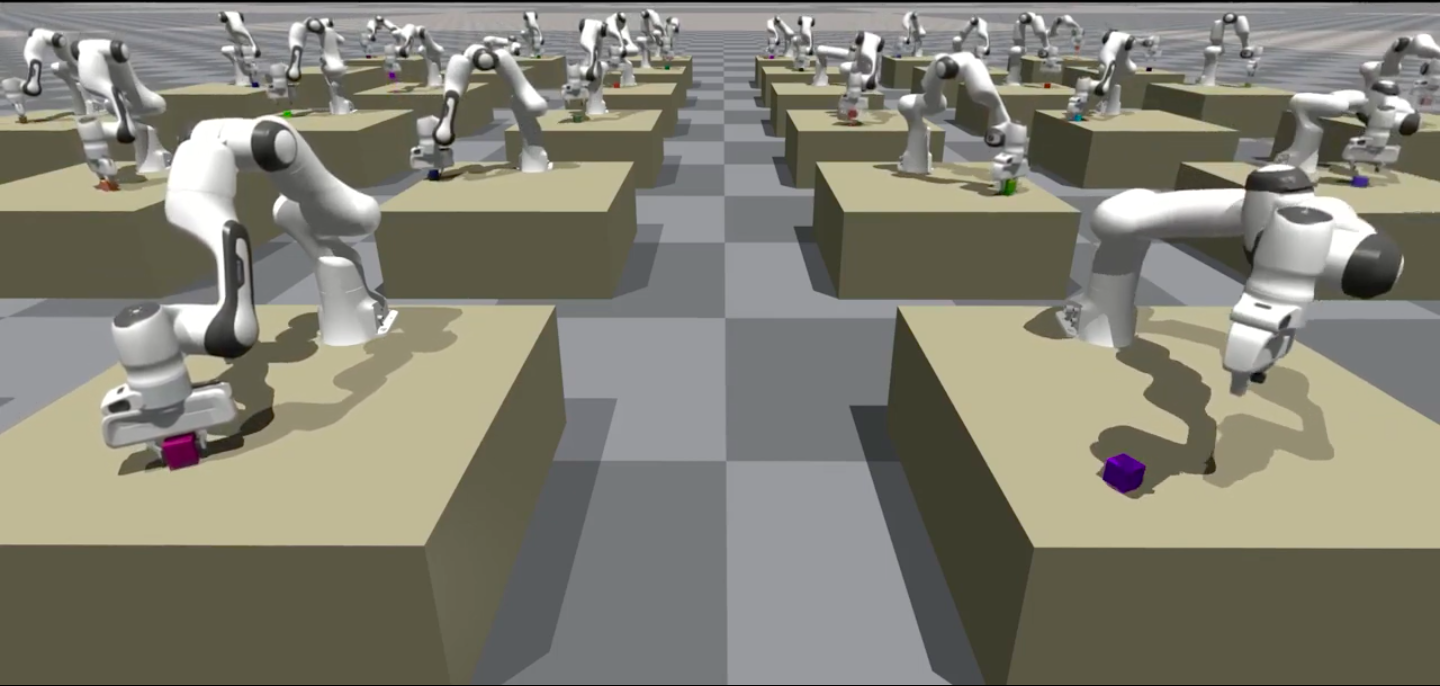
Infrastructure for mass data collection in simulation to support robot behavior learning.
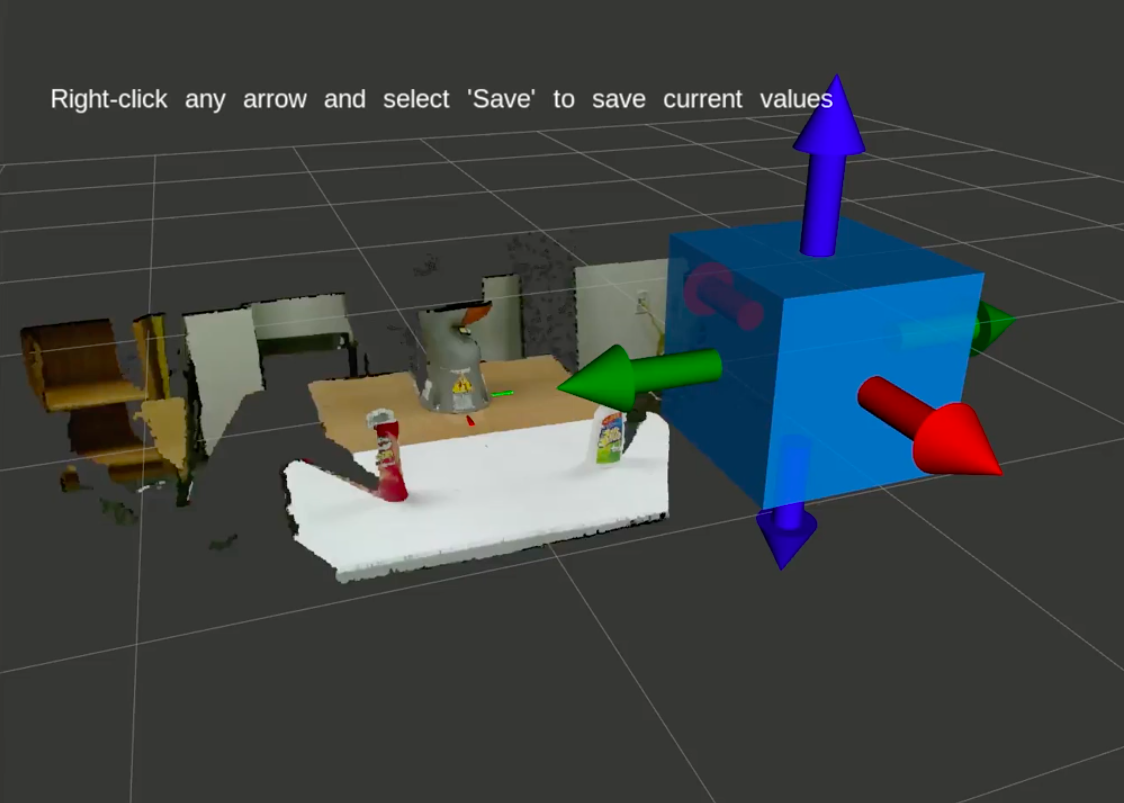
Tool for interactively selecting 3D region in rviz for point cloud segmentation.
My presentation at the 2020 RSS Pioneers Workshop about my research targets in the area of multisensory learning in robotics.
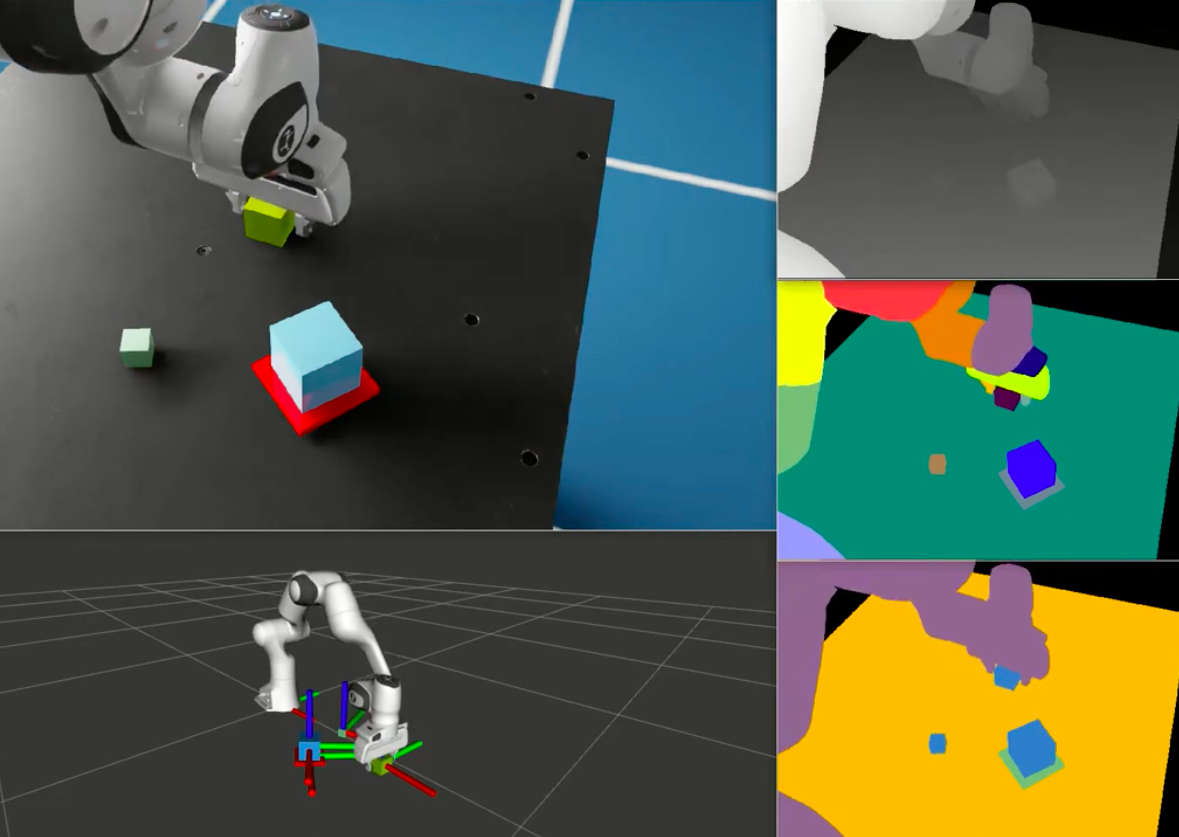
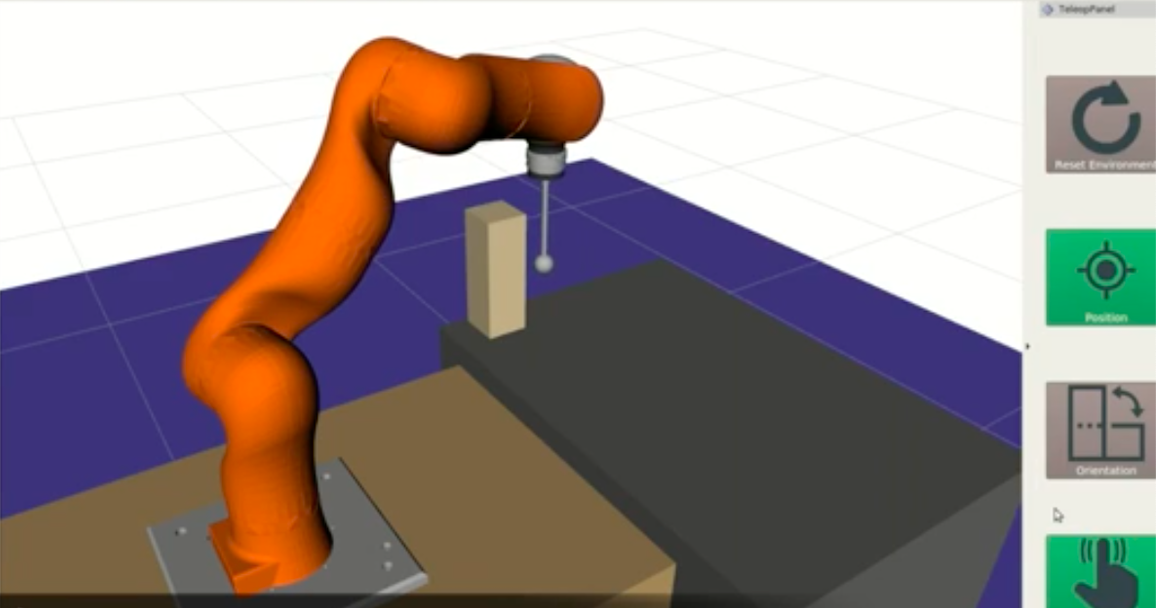
New method of efficiently acquiring human demonstrations for robot manipulation tasks.
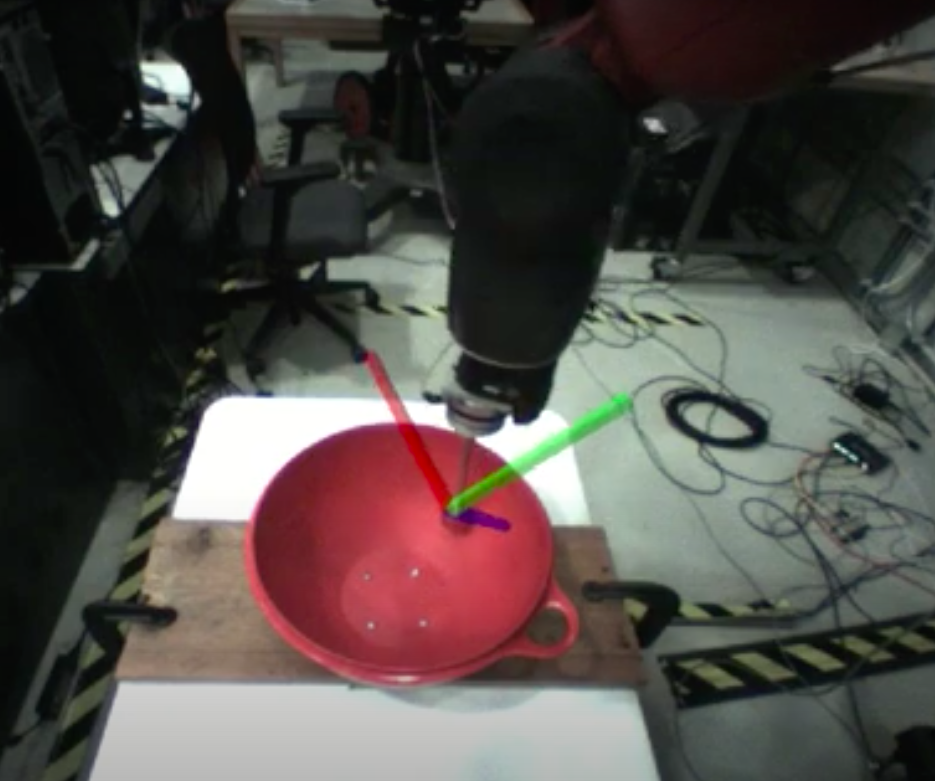
Approach to learning force-constrained robot manipulation tasks from human demonstrations.
Rendering forces in simulation environments for robot manipulation tasks using haptic feedback.
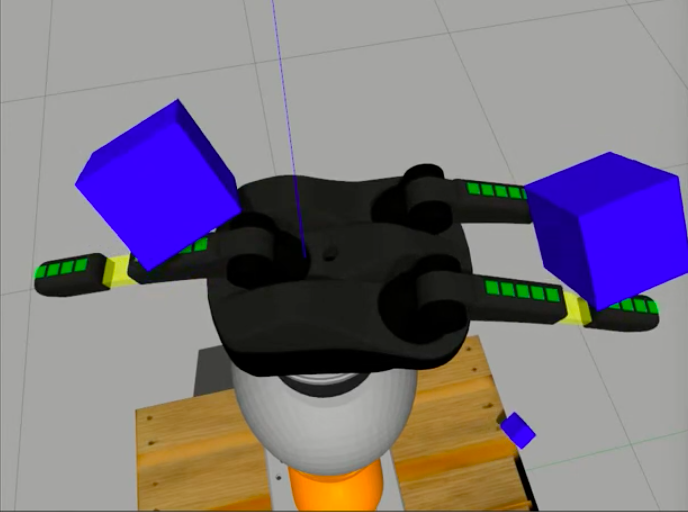
Augmented robot model for the Gazebo simulator enabling simulation of distributed contact sensors.