Planning under Uncertainty to Goal Distributions
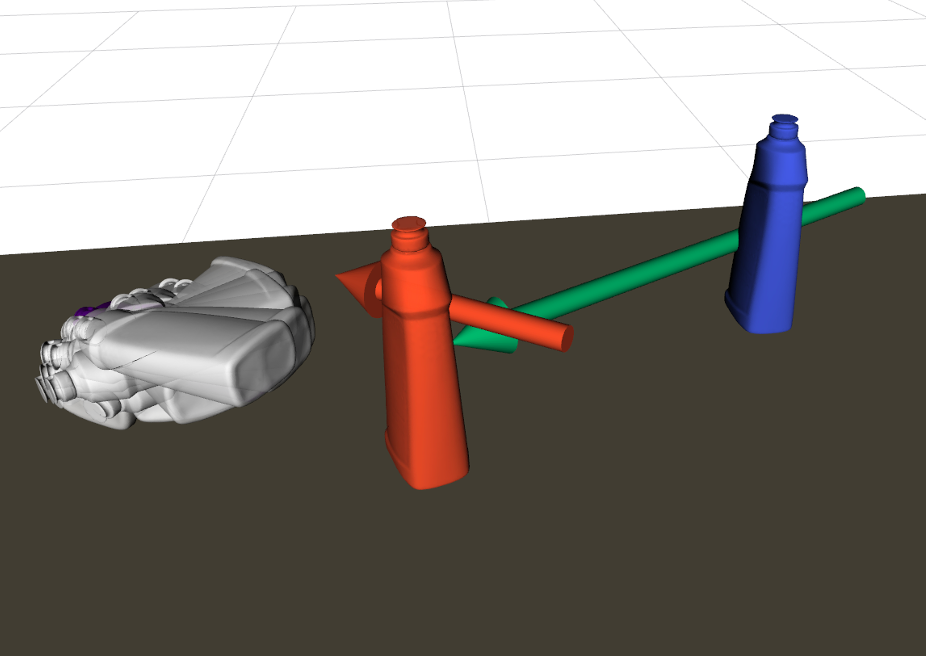
New formalization of goals as distributions for robot planning under uncertainty.
Roboticist - Python Developer - Rust Enthusiast
I am a Senior Software Engineer at Berkshire Grey. I’m passionate about robotics software development, particularly open source software for ROS and Linux. I’m excited about Rust - in my spare time, I am tinkering with implementing computational geometry algorithms from scratch in Rust.
I received my Ph.D. in Computing and Robotics from the University of Utah under the supervision of Dr. Tucker Hermans as a member of the Utah Learning Lab for Manipulation Autonomy. My dissertation work investigated skill planning under state and goal uncertainty for robot manipulations tasks.
If you’d like to chat about any of the projects I’ve worked on, or just want to connect, please find me on LinkedIn!
New formalization of goals as distributions for robot planning under uncertainty.
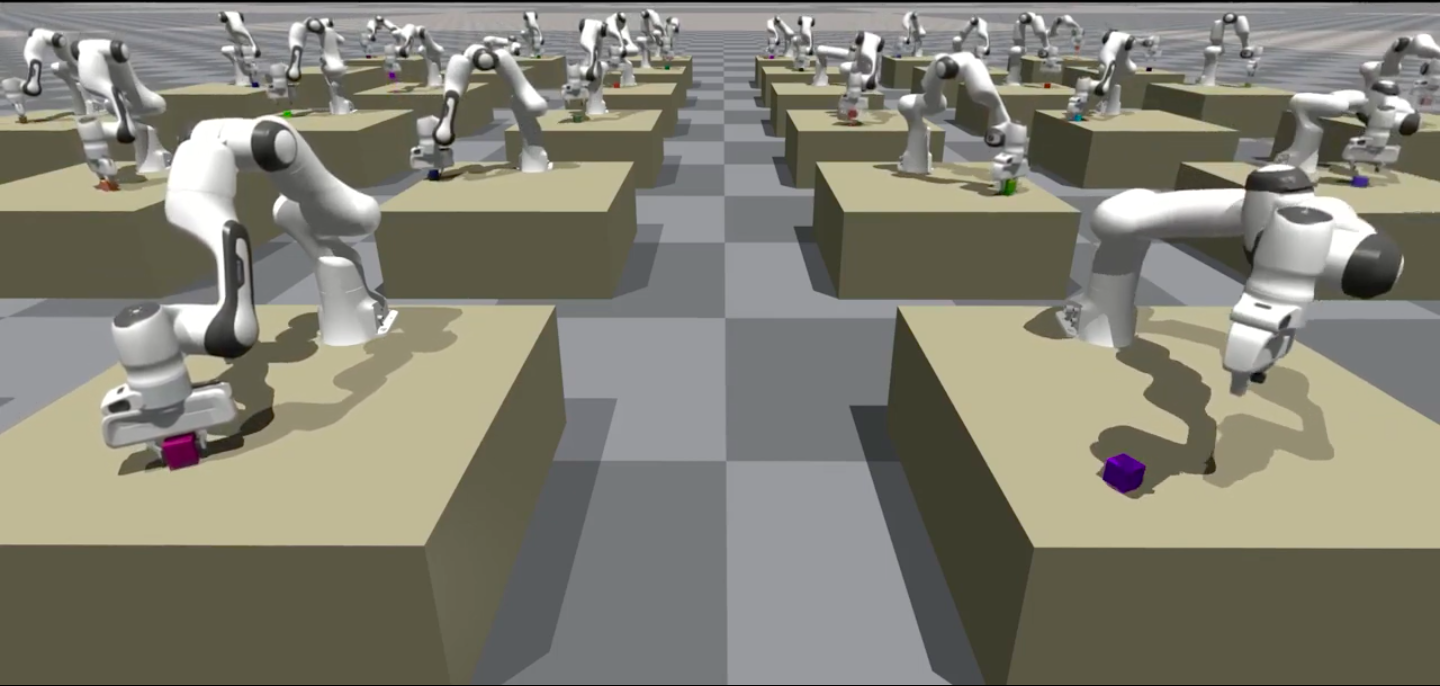
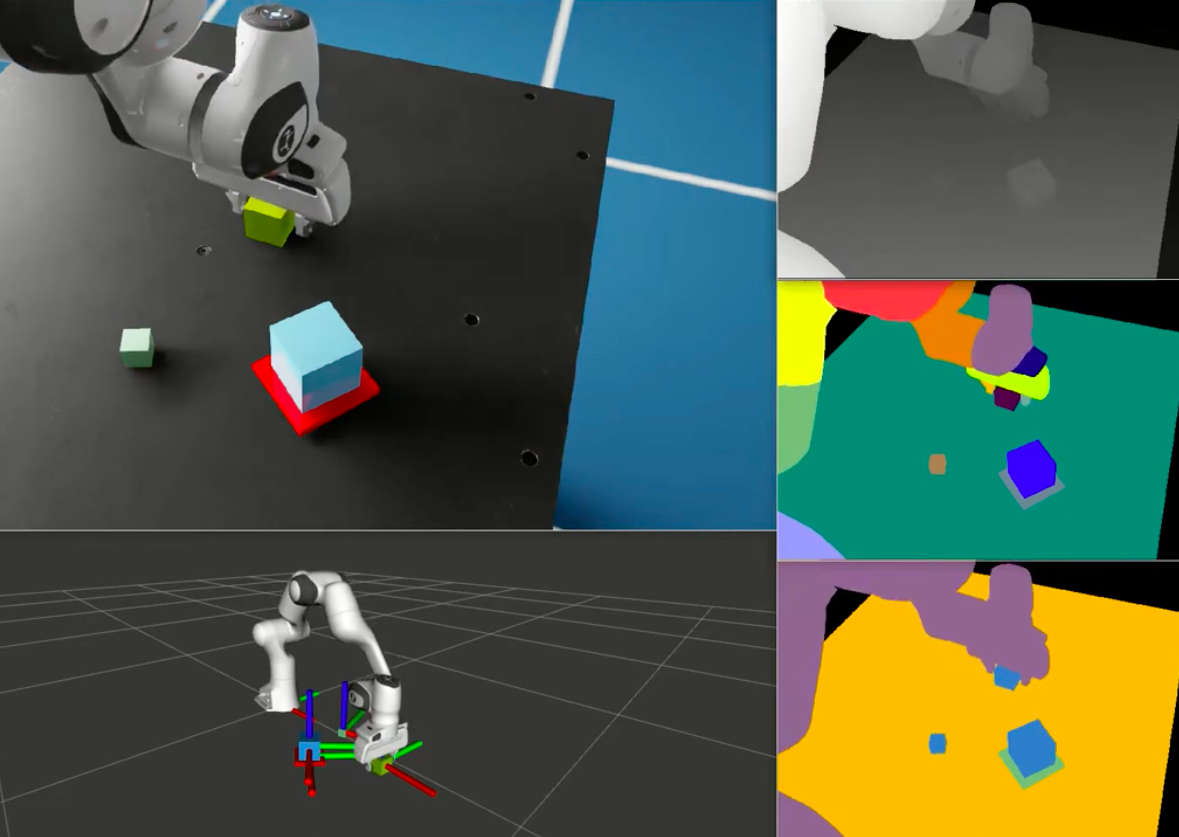
Infrastructure for mass data collection in simulation to support robot behavior learning.
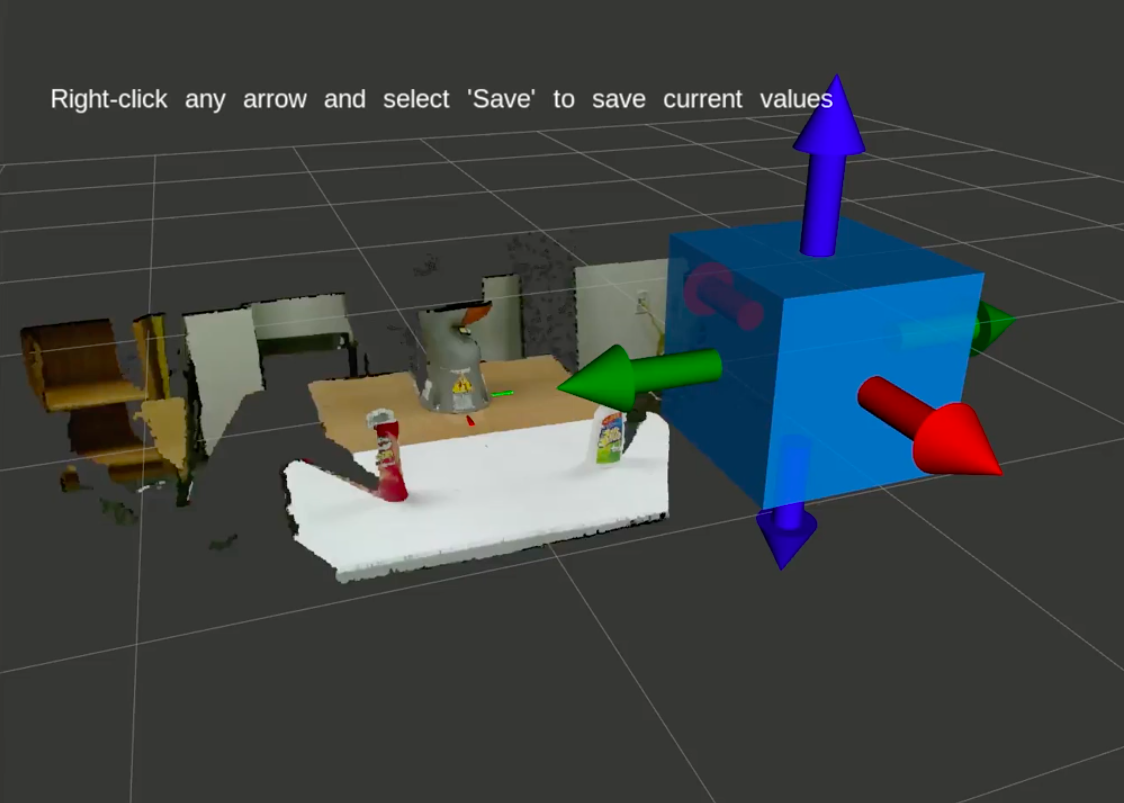
Tool for interactively selecting 3D region in rviz for point cloud segmentation.
My presentation at the 2020 RSS Pioneers Workshop about my research targets in the area of multisensory learning in robotics.