Adam Conkey
Adam Conkey
About Me
Experience
Publications
Projects
CV
Projects
IsaacGym Data Collection
Motion-planned manipulation behaviors using MoveIt and IsaacGym to collect data for learning algorithms.
Code
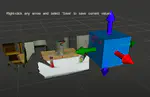
Region Selector for Pointcloud Segmentation
Tool for rviz that enables user to select the region over which pointcloud segmentation will be performed.
Robot Control in Gazebo
Robot control framework for simulations in Gazebo. Designed to be extensible for easily adding new controllers. Works in conjunction with my robot interface package to decouple the controllers from any particular robot.
Code
Robot Interface
Abstraction layer for controlling robots in a unified manner while accounting for robot platform-specific needs.
Code
Real-Time Robot Control
Real-time Orocos controllers for the KUKA LBR4+ robot. Includes a controller switching framework for safely swapping controllers at runtime, and a simulated FRI component that allows Orocos components to be tested Gazebo.
Code
ReFlex TakkTile in Gazebo Simulation
An actuated version of the ReFlex TakkTile hand and Gazebo plugins for simulating contact and pressure sensors on the fingers.
Code
Simulator for Teleoperation
A lightweight simulator with force rendering created with rviz and DART. Provides a training ground for learning robust policies from demonstration with a haptic input device.
Code
Baxter Demo Recorder
A demonstration recorder for the Baxter robot utilizing the button and display interfaces to make it easier to record demonstrations when operating Baxter in gravity compensation mode.
Code
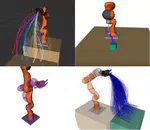
rviz Trajectory Visualization
Package for generating trajectory visualizations in rViz, including dynamic real-time visualizations showing a customizable trace of the robot’s end-effector.
Code
Cite
×