Adam Conkey
Adam Conkey
About Me
Experience
Publications
Projects
CV
Learning from Demonstration
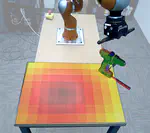
Simulator for Teleoperation
A lightweight simulator with force rendering created with rviz and DART. Provides a training ground for learning robust policies from demonstration with a haptic input device.
Code
Baxter Demo Recorder
A demonstration recorder for the Baxter robot utilizing the button and display interfaces to make it easier to record demonstrations when operating Baxter in gravity compensation mode.
Code
Active Learning of Probabilistic Movement Primitives
An active learning approach to learning a library of Probabilistic Movement Primitives capable of generalizing over a bounded space.
Adam Conkey
,
Tucker Hermans
PDF
Cite
Code
Dataset
Video
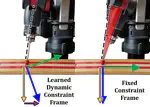
Learning Task Constraints from Demonstration for Hybrid Force/Position Control
An apporach to learning a dynamic constraint frame from demonstration for hybrid force/position control using Cartesian Dynamic Movement Primitives.
Adam Conkey
,
Tucker Hermans
PDF
Cite
Code
Dataset
Video
Cite
×