Adam Conkey
Adam Conkey
About Me
Experience
Publications
Projects
CV
Force Conrol
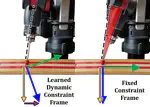
Learning Task Constraints from Demonstration for Hybrid Force/Position Control
An apporach to learning a dynamic constraint frame from demonstration for hybrid force/position control using Cartesian Dynamic Movement Primitives.
Adam Conkey
,
Tucker Hermans
PDF
Cite
Code
Dataset
Video
Cite
×