Adam Conkey
Adam Conkey
About Me
Experience
Publications
Projects
CV
1
Latent Space Planning for Multi-Object Manipulation with Environment-Aware Relational Classifiers
Transformer-based neural network that predicts object-environment relations for latent space planning of multi-object manipulation tasks.
Yixuan Huang
,
Nichols Crawford Taylor
,
Adam Conkey
,
Weiyu Liu
,
Tucker Hermans
PDF
Cite
Code
Video
Planning for Multi-Object Manipulation with Graph Neural Network Relational Classifiers
A graph neural network approach to multi-object manipulation from partial-view point clouds.
Yixuan Huang
,
Adam Conkey
,
Tucker Hermans
PDF
Cite
Code
Video
Active Learning of Probabilistic Movement Primitives
An active learning approach to learning a library of Probabilistic Movement Primitives capable of generalizing over a bounded space.
Adam Conkey
,
Tucker Hermans
PDF
Cite
Code
Dataset
Video
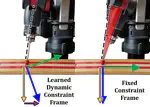
Learning Task Constraints from Demonstration for Hybrid Force/Position Control
An apporach to learning a dynamic constraint frame from demonstration for hybrid force/position control using Cartesian Dynamic Movement Primitives.
Adam Conkey
,
Tucker Hermans
PDF
Cite
Code
Dataset
Video
Cite
×