Adam Conkey
Adam Conkey
About Me
Experience
Publications
Projects
CV
rviz
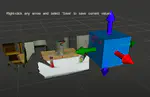
Region Selector for Pointcloud Segmentation
Tool for rviz that enables user to select the region over which pointcloud segmentation will be performed.
Simulator for Teleoperation
A lightweight simulator with force rendering created with rviz and DART. Provides a training ground for learning robust policies from demonstration with a haptic input device.
Code
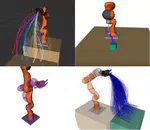
rviz Trajectory Visualization
Package for generating trajectory visualizations in rViz, including dynamic real-time visualizations showing a customizable trace of the robot’s end-effector.
Code
Cite
×